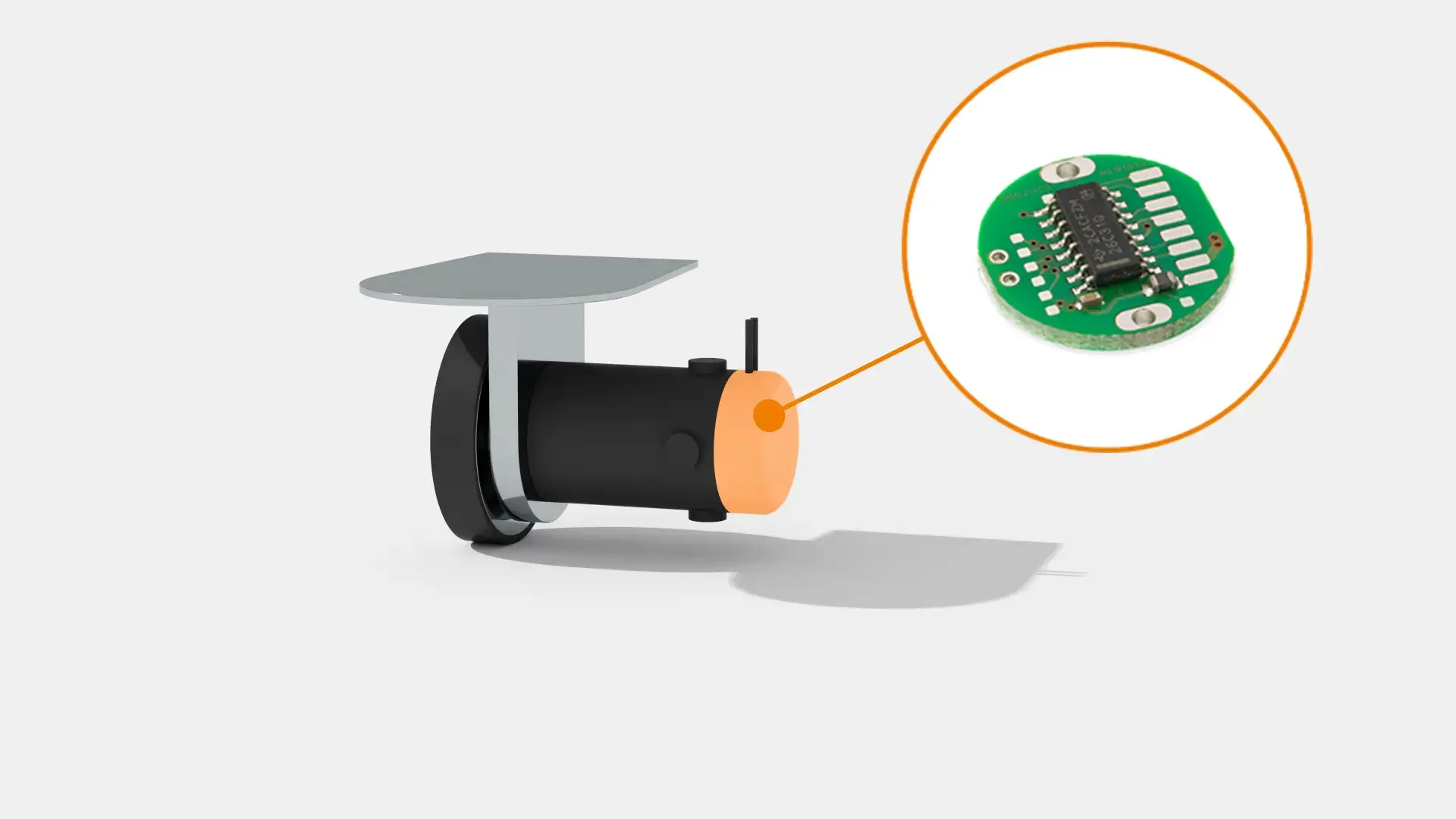
AGV & AMR drive units typically consist of a servo motor, a speed reducer, brake and tires and require an encoder to control the movement, steering and stopping of the vehicle. In speed monitoring, especially in combination with safety laser scanners for safeguarding danger points, the encoders are an essential component of a vehicle with a safety function.
Each axle/wheel of the AGV is steered around its axis by the torque difference between two motors. Closed loop control is achieved by angular position feedback from each axle drive.