휴머노이드 로봇
휴머노이드 로봇은 균형과 조율 및 민첩성을 위해 정밀한 위치 피드백을 필요로 합니다. RLS 마그네틱 엔코더는 복잡한 로봇 시스템에서 안정적인 걷기, 매끄러운 동작, 안전한 상호작용이 가능하도록 지원하는 신뢰할 수 있고 정확한 소형 솔루션을 제공합니다.
탁월한 성능
RLS™비접촉식 마그네틱 엔코더는 높은 정확도와 신뢰도를 보장하므로 복잡한 휴머노이드 로봇 동역학에서 매끄럽고 정밀한 동작 제어가 가능합니다.
소형의 통합 최적화 설계
슬림한 이 엔코더는 성능 저하 없이 휴머노이드의 관절, 손목, 손가락, 목 등 협소한 공간에 쉽게 장착할 수 있습니다.
높은 신뢰성
비접촉식 마그네틱 엔코더 기술을 탑재한 RLS 센서는 수년간 안정적인 작동을 유지합니다.
다양한 크기와 구성
엔코더는 휴머노이드 로봇의 여러 관절 및 기계 셋업에 맞출 수 있도록 다양한 폼 팩터로 제공됩니다. 또한 여러 가지 분해능 옵션과 통신 프로토콜을 지원합니다.
RLS 마그네틱 엔코더를 선택해야 하는 이유
산업 과제
- 협소한 통합 공간에 많은 관절 수
- 가볍고 에너지 효율이 우수한 시스템 필요
- 관절과 구성품에 접근하기 어려운 복잡한 어셈블리
- 인간 주변에서 신뢰할 수 있는 안전한 작업 필요
- 전체 관절 동작 범위에서 정확한 위치 감지
RLS 솔루션
- 광범위한 분해능
- 업계 표준의 절대 또는 증분 출력 옵션
- 높은 동적 응답
- 높은 정밀도
- 폭넓은 설치 공차
- 높은 신뢰성
- 낮은 전력 소비량
- 외부 자기력에 대한 우수한 내성
- 소형의 가벼운 설계
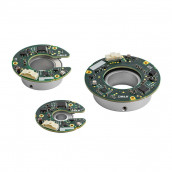
여러 유형의 로봇 관절에 권장되는 엔코더
더 큰 관절(예: 어깨, 팔꿈치, 엉덩이, 무릎)
이러한 관절에는 AksIM-2와 같은 소형의 오프축 엔코더가 적합합니다. 그러한 엔코더는 로우 프로파일 할로우 링 설계에서 고분해능 절대 피드백을 제공하므로, 부피가 크고 부하가 많이 걸리는 관절에 쉽게 통합할 수 있습니다.
공간이 협소하거나 정렬이 까다로운 회전하는 관절에는
Orbis와 같은 엔코더를 적극 추천합니다. 관통형 샤프트 설계, 유연한 장착, 다양한 통신 프로토콜 지원 등의 이점이 있어 어깨, 팔꿈치, 손목 등 동적 관절에 적합합니다.
작고 가벼운 관절(예: 손가락, 그리퍼)
RM08과 같은 초소형 엔코더가 이러한 관절에 가장 잘 맞습니다. 작은 크기에도 불구하고, 적은 소비 전력에 정확한 고속 피드백을 제공하므로 로봇의 손 또는 엔드 이펙터의 모터를 미세하게 제어할 수 있습니다.
PAL 로봇 성공 사례
“가장 흡족한 것은 광범위한 옵션과 모든 구성품의 맞춤형 조정이 가능하다는 점입니다. RLS 엔코더는 수많은 구성을 지원합니다. 다양한 통신 프로토콜, 센서 크기 및 인터페이스 중에서 선택할 수 있습니다. 선택의 폭이 다양할수록 더 작고 가벼우며 강력한 로봇을 제작하는데 유리합니다.”