
磁阻效应
2021年9月27日
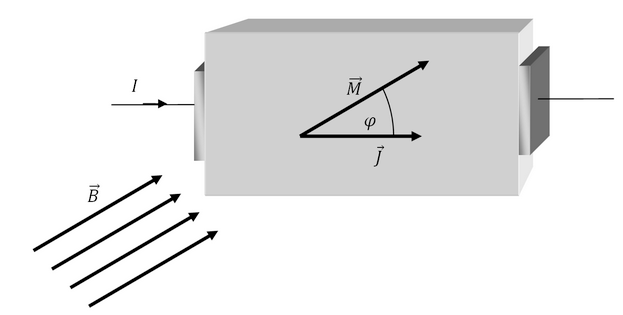
磁阻传感器包括一个由磁敏合金条(如镍铁 (NiFe))制成的电阻。外部磁场会对镍铁中的磁畴施加应力,并降低材料的电阻。移除磁场后,电阻会迅速恢复正常,因此可作为很有用的磁场检测工具。磁阻效应有三种常见类型:各向异性效应 (AMR)、隧道效应 (TMR) 和巨磁阻效应 (GMR)。AMR传感器最常用于编码器行业。
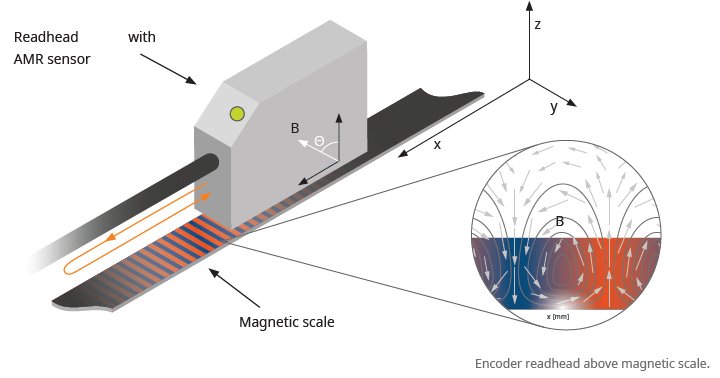
电阻的变化与磁场的极性无关。例如,一个有32个磁极的磁环每转产生32个脉冲,而一个有32个磁极的轮式编码器的霍尔传感器每转只产生16个脉冲。这使得磁阻传感器成为增量式应用的理想选择。
但这项技术也有不足,磁阻传感器虽然采用半导体技术制造,但不是固态器件,因此无法直接集成到芯片级的处理器中。作为离散传感器,它们尺寸更大、更难制造,并且需要额外的支持电路,这增加了成本和复杂性。
Posted in: Encoder knowledge