
How to choose between Nonius and AksIM technology
2021年1月11日
对于Nonius技术,磁码载体由两个磁编码器码道组成。外码道由偶数个交替磁化的磁极组成,用于高精度的位置测定。因此,它被称为主码道。第二个内码道比外码道少一对磁极,因此被称为Nonius码道。该码道用于计算磁盘旋转一圈内的绝对位置。这是通过计算两个码道之间的角度差来完成的。采用这种技术的编码器必须在使用前进行校准。AksIM技术可替代Nonius技术,且不需要校准。
采用AksIM和Nonius技术的编码器的位置误差在机械安装过程中在安装公差范围内变化 — 无需校准
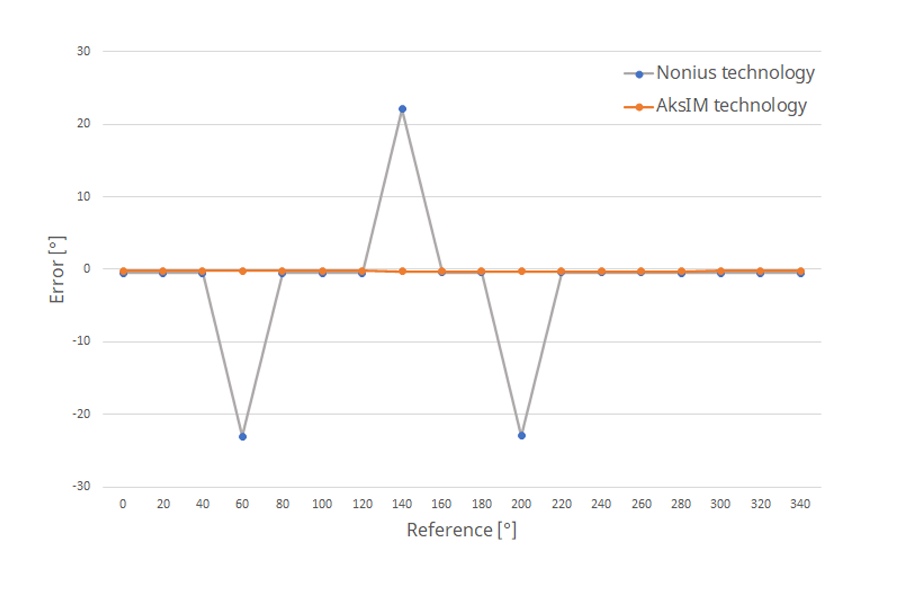
如果组件发生了安装公差范围内的机械变化,并且读数头和编码器磁环之间的位置也发生变化,那么采用AksIM技术的编码器还可以正常工作,并可提供精确的绝对位置。在同样的情况下,采用Nonius技术的编码器的位置误差会非常大,可能会带来灾难性的安全后果。上图显示了采用Nonius技术的编码器在可靠性方面的主要缺点,无论这些编码器出自哪个制造商。
采用Nonius技术的编码器之所以需要校准,是因为主从码道之间的角位移非常小,而对这个角度的检测在读数头和磁环之间的不同位置会发生变化。这意味着,即使在规定的公差范围内安装,各编码器系统之间的间隙位置也总会有微小的差异。在校准过程中,编码器系统记录每个码道的角度,并更新主码道角度相对于从码道角度的内部查找表。如果不执行校准,读数头将使用默认的查找表,这将与编码器的安装不匹配,绝对位置在曲线的某些部分也将不正确,如图所示。
Posted in: How to