
磁気抵抗の効果
2021年9月27日
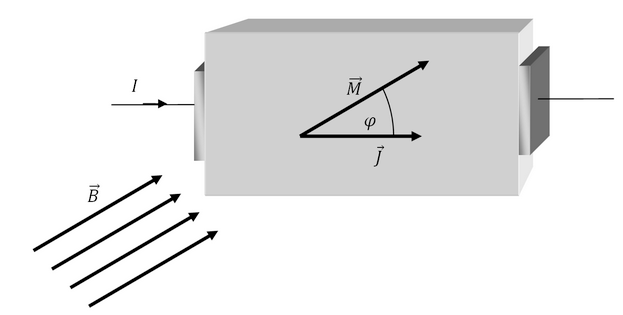
磁気抵抗センサーは、磁気的に反応する合金 (ニッケルと鉄の合金 (NiFe) など) で作られた抵抗から構成されます。外部磁界が NiFe の磁区に応力を加え、抵抗を減少させます。外部磁界がなくなると、抵抗が瞬時に通常に戻るため、磁界の検出に役に立ちます。磁気抵抗には主に、異方性 (AMR)、トンネル (TMR)、巨大磁気抵抗 (GMR) の 3 種類があります。エンコーダ分野で最も広く使用されているのは、AMR センサーです。
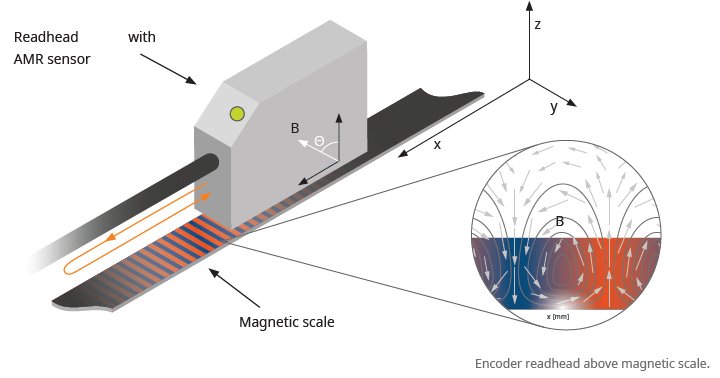
抵抗の変化は、磁界の極性の影響を受けません。例えば、32 極のリングは 1 回転で 32 パルスを出力しますが、32 極のエンコーダリングと組み合わせたホールセンサーは、1 回転で 16 パルスを出力します。そのため、磁気抵抗センサーはインクリメンタル方式に理想的と言えます。
一方で、デメリットも挙げられます。磁気抵抗センサーは、半導体技術で製造されるものではありますが、ソリッドステートなデバイスではありません。そのため、チップレベルでプロセッサに直接組み込むことはできません。また個別センサーのように、サイズが大きめで、製造も簡単ではなく、サポート回路が別途必要です。結果、コストと複雑さが増します。
Posted in: Encoder knowledge