
How to choose between Nonius and AksIM technology
Nonius では、2 本の磁気エンコーダトラックから磁気コードが構成されます。外側のトラックは、磁極が偶数個、極性を交互に逆にして刻まれており、高精度な位置検出に使用します。そのため、マスタートラックとして機能します。内側のトラックには、外側よりも磁極が 1 組少なく刻まれており、Nonius トラックとして機能します。このトラックを基に、1 回転内の絶対位置が算出されます。位置の算出は、2 本のトラックの角度差を算出することで行われます。この技術を実装したエンコーダは、使用する前にキャリブレーションが必要です。Nonius の代わりとしては、AksIM も使用できます。AksIM はキャリブレーションが不要です。
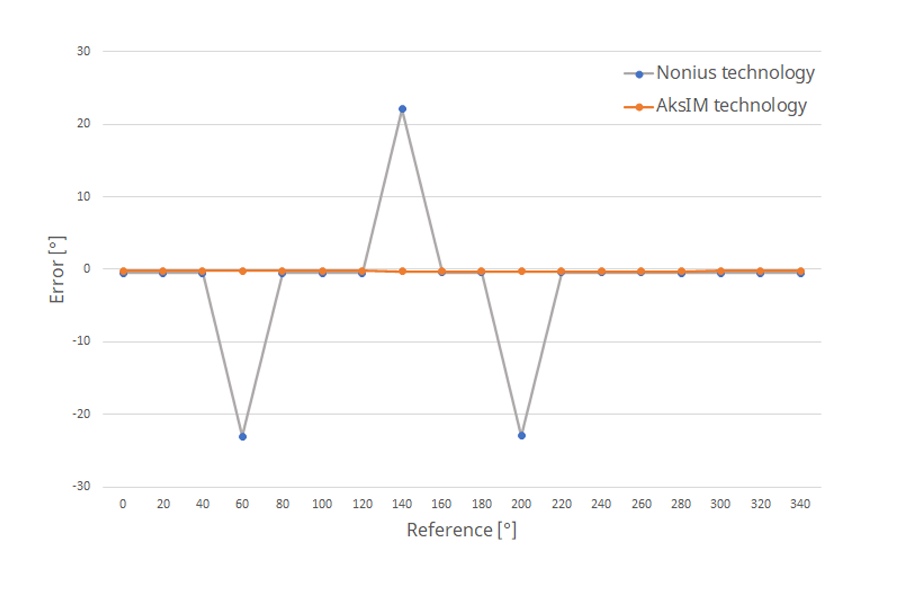
取付け公差内で機械的な取付け高さを変えた場合の AksIM と Nonius の位置誤差の比較 - キャリブレーションなし
取付け公差内での機械的な変化があり、かつリードヘッドと磁気リングの位置関係が変化しても、AksIM は問題なく動作し、正確な絶対位置を出力します。一方で同様の条件では、Nonius は位置誤差が大きくなり、安全面で深刻な事態を引き起こす可能性があります。上図に示したとおり、Nonius は動作の安定性という点で大きな短所があります。同様の技術を採用した他メーカーのエンコーダでも同じことが言えます。
マスタートラックと Nonius トラック間の角度のずれが非常に小さいことと、リードヘッドと磁気リング間の位置が変わるとこの角度の検出が変化すること、これらの理由から、Nonius にはキャリブレーションが不可欠です。仕様公差内で取り付けたとしても、取付け高さにわずかな差異があるとも言えます。キャリブレーション中、エンコーダシステムが各トラックの角度を記録し、Nonius トラックの角度を基準にしてマスタートラックの角度の内部参照テーブルを更新します。このプロセスを行わなかった場合、リードヘッドは、実際の取付け状況にそぐわないデフォルトの参照テーブルを使用することになり、時折、図示のように誤った絶対位置が出力されるようになります。