
Magnetoresistiver Effekt
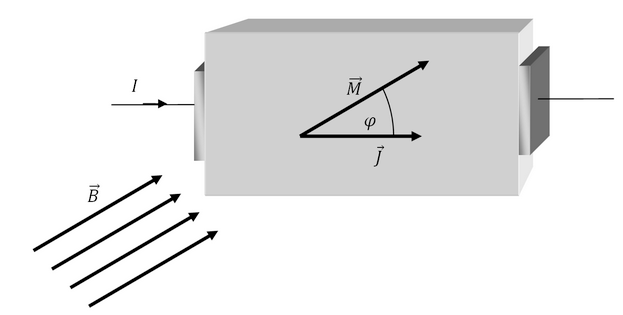
Ein magnetoresistiver Sensor besteht basiert auf einem Widerstand, der durch magnetempfindliche Streifen einer Nickel-Eisen-Legierung (NiFe) entsteht. Ein äußeres Magnetfeld regt die magnetischen Domänen (auch „Weiss-Bezirke“ genannt) in der NiFe-Legierung an und reduziert den Widerstand des Werkstoffs. Wird das Feld entfernt, normalisiert sich der Widerstand schnell, was ihn zu einem nützlichen Werkzeug für die Magnetfelderfassung macht. Es gibt drei gängige Arten von magnetoresistiven Effekten: anisotrop (AMR), Tunnel (TMR) und Riesenmagnetowiderstand (GMR). AMR-Sensoren werden am häufigsten in der Messtechnik eingesetzt.
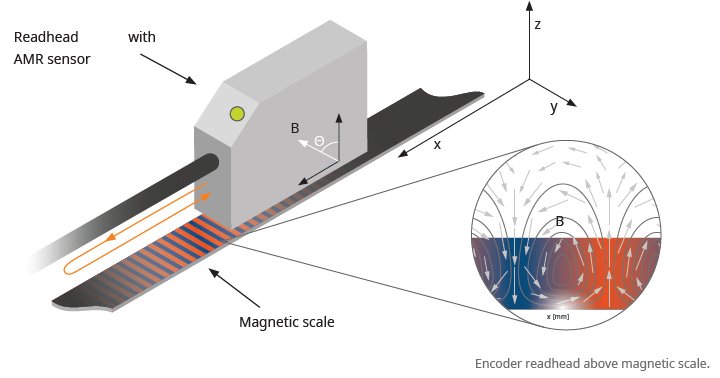
Die Widerstandsänderung erfolgt unabhängig von der Polarität des Magnetfelds. Ein Ring mit 32 Polen erzeugt beispielsweise 32 Impulse pro Umdrehung. Hall-Sensoren mit 32-poligen Messrädern würden dagegen nur 16 Impulse pro Umdrehung erzeugen. Deshalb sind magnetoresistive Sensoren ideal für inkrementelle Anwendungen.
Diese Technologie hat aber auch Nachteile. Obwohl für ihre Herstellung Verfahren der Halbleitertechnik angewandt werden, sind magnetoresistive Sensoren keine Halbleiterbauteile. Sie können daher nicht direkt auf Mikrochip-Ebene im Prozessor integriert werden. Als einzelne Sensoren sind sie größer, schwieriger zu fertigen und benötigen zusätzliche Hilfskreise. Dadurch steigen Kosten und Komplexität.
Auswahlhilfe für Messsysteme öffnen Alle Artikel