

Binghamton University Rover Team at the 2026 University Rover Challenge finals
Background
The Binghamton University Rover Team (BURT) is an interdisciplinary student team focused on designing a mock Mars rover. Founded in 2017 as a senior capstone project, BURT has evolved into becoming a contender in the University Rover Challenge (URC). The team is composed of highly motivated engineering, science, and business students who design, build, and test a fully functioning rover to compete in missions including dexterous manipulator tasks, extreme driving, and life detection.
Challenge
To successfully compete in the 2026 URC finals, a rover must perform complex tasks including autonomously typing on a keyboard, placing a sample tube into a cache container, and connecting a hose. This requires a highly dexterous robotic arm. In order to precisely operate their 6-Degree of Freedom Manipulator, the team needed to implement inverse kinematics. This mathematical process enables the operator to move the arm by inputting coordinates of the end effector rather than controlling each joint individually. Accurate and reliable real-time feedback of each joint is essential for this process to generate precise movements.

BURT completing the Equipment Servicing Mission
Solution
To meet the demanding requirements of precise joint control, BURT integrated AksIM-2™ (049 size) absolute magnetic encoders from RLS into each of their custom cycloidal gearboxes and joints of their 6-DOF robotic arm.
Paired with the onboard stepper controllers, the AksIM-2 encoders provide the ultra-high-resolution position feedback vital for running sophisticated inverse kinematics algorithms. The compact, off-axis design of the 049 size makes it ideal for the confined spaces of the cycloidal gearboxes, allowing the team to keep the arm lightweight without sacrificing mechanical strength.
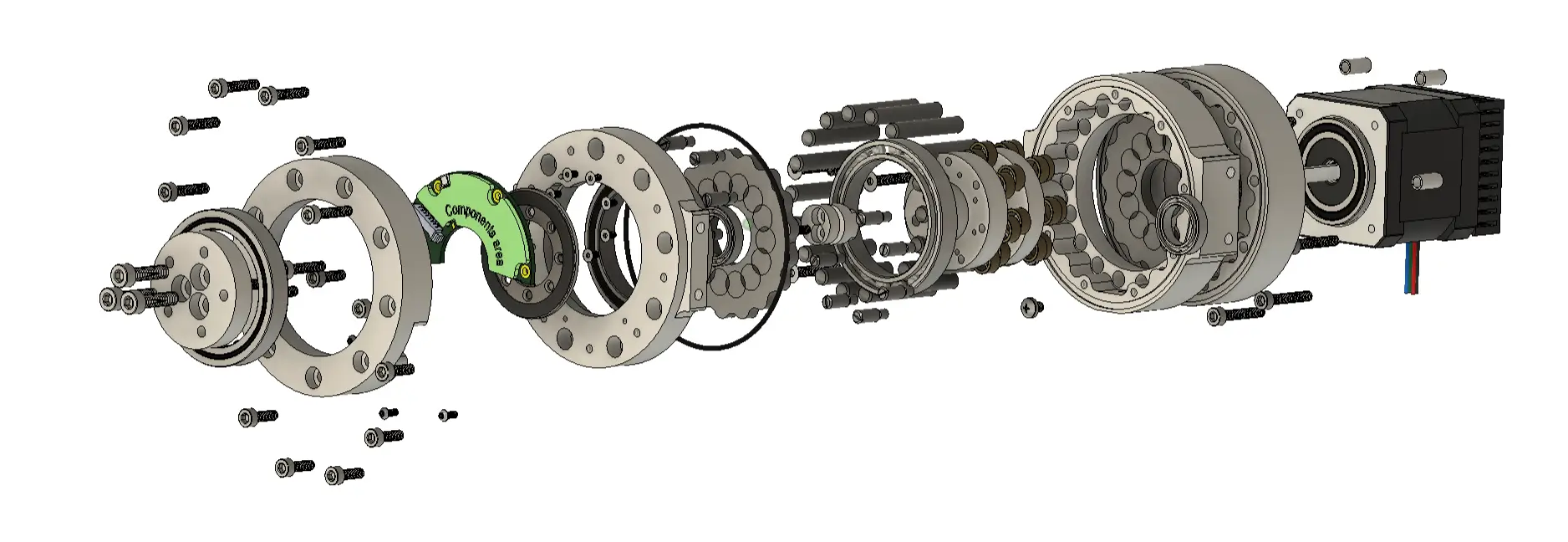
AksIM-2™ encoders in the cyclodial gearbox
Position feedback by AksIM-2™
The AksIM-2™ is a true absolute magnetic encoder designed for applications with limited space and demanding precision requirements. Its non-contact, off-axis style provides instant, high-resolution angular position feedback the moment the system is powered on, eliminating the need for time-consuming homing procedures during a testing and timed competition.
The 049 size specifically offers a low-profile form factor and a hollow-ring design, which allows mechanical shafts to be routed directly through the center of the robotic joints. Furthermore, the encoder’s resilience to dust, dirt, and vibrations ensures it performs flawlessly in the harsh, sandy, simulated Martian environments of the University Rover Challenge.
Results
The AksIM-2™ encoders proved to be essential sensors for BURT’s robotic arm. This mechanical and software reliability was directly reflected in the team’s competition results. Driven by this innovation, BURT scored 1st overall out of all New York teams, secured an impressive 25th overall out of 116 international teams, and placed 9th globally in the System Acceptance Review (SAR) video presentation.
About BURT
The Binghamton University Rover Team (BURT) is a student-run robotics organization at Binghamton University, dedicated to providing students with real-world engineering, programming, and project management challenges through the design and fabrication of next-generation mock-Mars rovers.
For more information visit https://www.binghamton.edu/watson/competes/rover-team/.

