
Can any magnet be used?
The encoder can be supplied with a pre-selected magnet to ensure that optimum performance is achieved. Alternatively magnets can be sourced from other suppliers but they must conform to the following guidelines to ensure that performance specifications can be achieved.
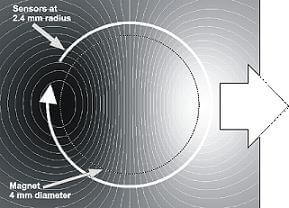
To select a suitable magnet it is important to know the properties of the sensors. Hall Sensors are only sensitive to the perpendicular component of magnetic flux density (B). The encoder has a Hall sensor array arranged in a circle. Sensors are located on the surface of the silicon.
Magnets must be cylindrical in shape and diametrically polarized. The main criteria for magnet selection is the distribution of perpendicular component of magnetic flux density at the sensors location (Bn).
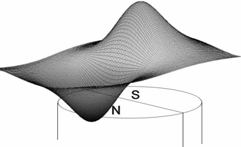
Distribution of perpendicular component of B
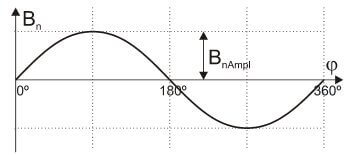
Distribution of Bn and its modulation if the magnet is rotated through 360° (for AM512B)
The following table contains values for AM512B. For other ICs please check the corresponding datasheet.
|
Parameter |
Symbol |
Min. |
Typ. |
Max. |
Unit |
Note |
|
Amplitude of Bn |
BnAmpl |
|
350 |
|
Gauss |
* |
|
Offset of Bn |
BnOffset |
0 |
|
±15 |
Gauss |
** |
We recommend that a magnet with the following parameters is used to provide the necessary modulation.
|
Parameter |
Typ. |
Unit |
Note |
|
Diameter |
4 |
mm |
|
|
Length |
4 |
mm |
|
|
Material |
Sm2Co17 |
|
* |
|
Material remanence |
10.5 |
kGauss |
|
|
Temperature coefficient |
-0.03 |
% / °C |
|
|
Curie temperature |
720 |
°C |
|
Magnet quality and the nonlinearity error
Each encoder chip is optimized during production to give best performance with an ideal magnet when perfectly aligned.An ideal magnet would have the polarization border exactly in the middle of the magnet. In reality this is impossible to achieve repeatedly.
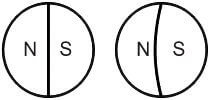
Ideally polarized magnet and not ideally polarized magnet
If the polarization is not exactly in the middle of the magnet then the modulation of magnetic field has an offset. Offset represents a mean value of B when the magnet is rotated through 360° and the B is measured at 2.45 mm distance (for AM512B) from the magnet surface and at 2.4 mm radius (for AM512B).
Offset will cause larger than normal integral nonlinearity errors if the encoder chip placement is not in the centre of the magnet rotation.