
LinACE™ vs. magnetostrictive encoders with SSI output
LinACE™ and magnetostrictive sensors can be used in similar applications. However, there are some important differences between them.
Magnetostrictive sensors use the principle of magnetostriction to determine position. They consist of a ferromagnetic waveguide, a position magnet, a damping zone and a strain pulse transducer with measurement electronics. A current pulse is applied to the waveguide, which generates a radial magnetic field that interacts with the magnetic field generated by the moving position magnet.
The interaction causes a torsional strain pulse that propagates along the waveguide in both directions. At one end of the guide, the pulse is attenuated, while at the other end it is converted into an electrical signal by the strain pulse converter.
Based on the time that elapses between the triggering of the current pulse and the reception of the electrical signal, the exact position of the moving position magnet can be calculated.
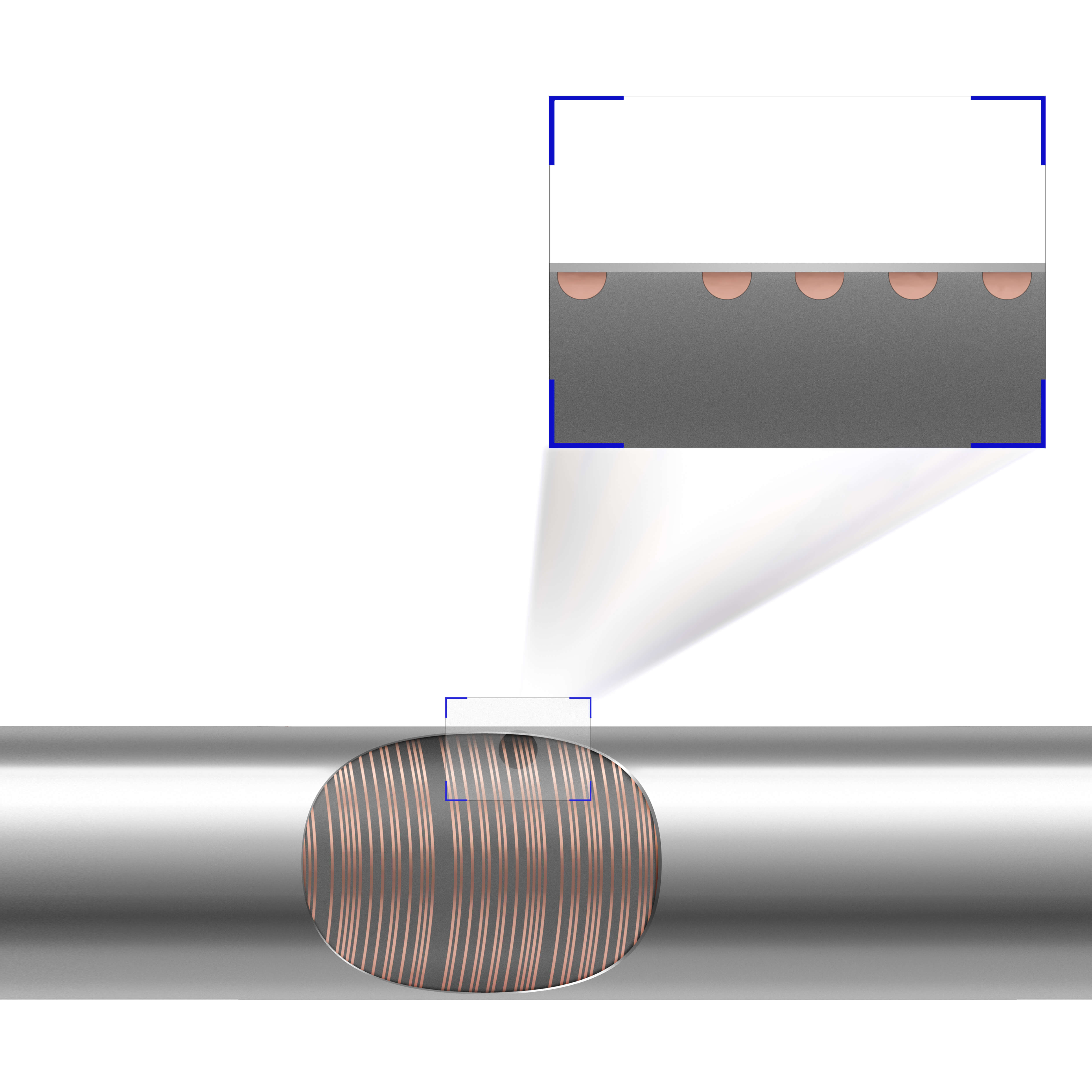
The LinACE sensor is an encoder or readhead that is paired with a code carrier or scale that encodes the position. The coded shaft serves as the scale.
The LinACE readhead reads the coded shaft and converts the coded position into a digital signal. It is a true absolute encoder. It is available in asynchronous serial, PWM, SSI and BiSS output versions and offers a range of selectable resolutions from 10 μm to 0.5 μm at speeds up to 5 m/s.
Why choose LinACE encoders instead of magnetostrictive sensors?
- High accuracy
- Compact design
- Resistance to vibrations
- Low temperature drift
- Wide temperature range
For more information on LinACE, visit the LinACE website.
High accuracy
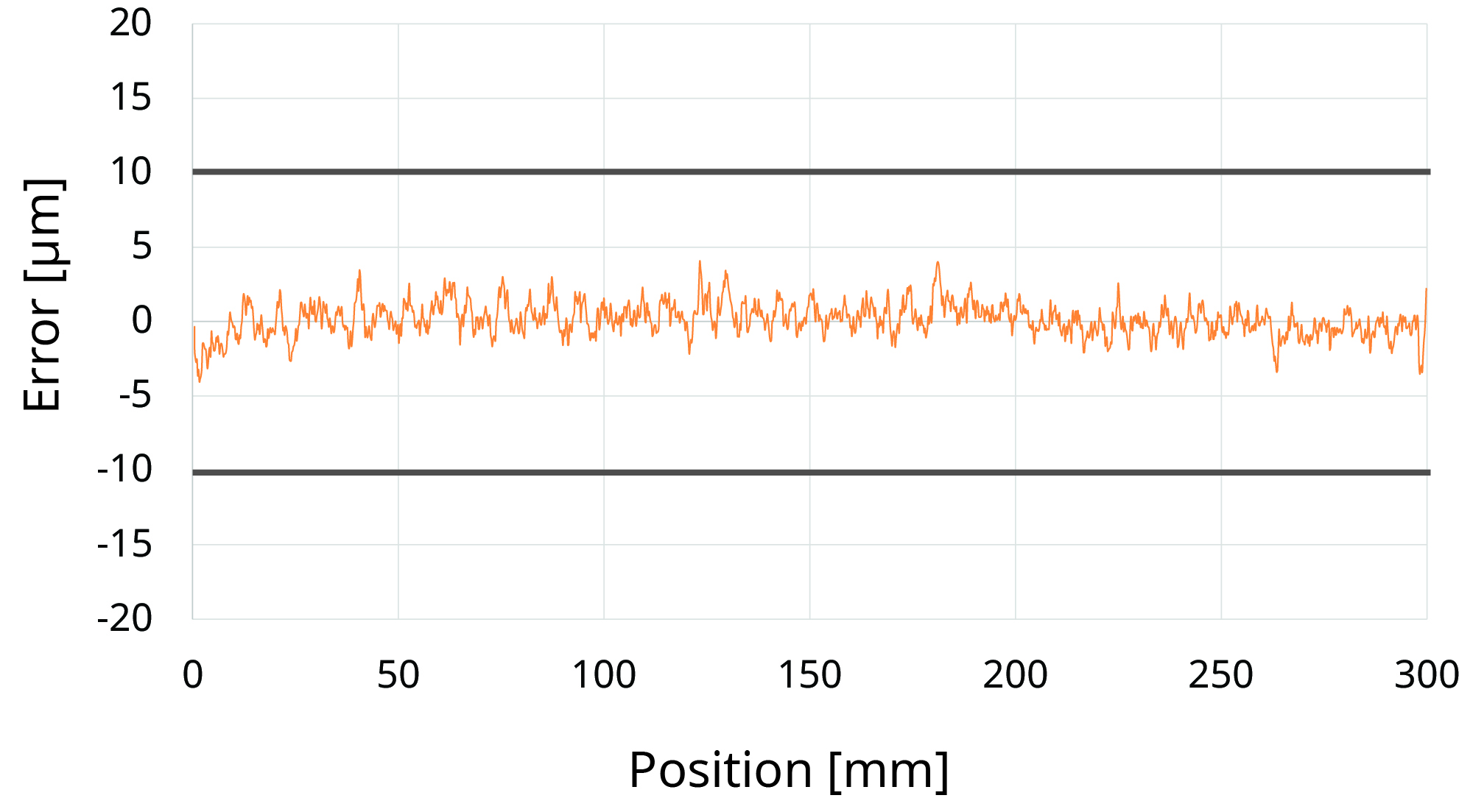
LinACE encoders are available with a resolution of 10 μm to 0.5 μm and an accuracy of ±100 μm to ±5 μm. An accuracy of ±5 μm is available up to a measuring length of 100 mm. And an accuracy of ±10 μm is available up to a measuring length of 450 mm.
The typical accuracy for a measuring length of 100 mm and an accuracy of ±5 μm is shown in the following graph.
LinACE accuracy graph
However, we have to take into account the temperature drift due to the thermal expansion of the coded shaft and the aluminium housing.
Magnetostrictive encoders can also have a resolution of 0.5 μm. However, for magnetostrictive encoders, linearity and not accuracy is specified. For lengths up to 500 mm, the typical linearity is ±40 μm or ±50 μm.
It is worth noting that the temperature drift for magnetostrictive sensors is also higher than for LinACE, as described in one of the following sections.
Compact design
LinACE has a readhead length of 29 mm to max. 40 mm and a diameter of max. 35 mm. There is no damping zone at the ends. The entire length of a coded solid steel shaft can be used for measuring the position.
Magnetostrictive transducers have a typical sensor head length of about 80 mm, a distance from the sensor head to the zero position of 25 to 50 mm and a damping zone of 60 mm at the end of the rod. The total length of the transducer is therefore measuring length + 150 to 200 mm. While the cross-section of the sensor head can be almost 50 mm.
LinACE encoder v. magnetostrictive transducer design
![]()
Resistance to vibrations
The LinACE encoder is resistant to shock and vibration. The position of the encoder is maintained even if the shaft rotates during forward and backward movement.
Magnetostrictive encoders are based on a torsional strain pulse moving along the waveguide. This makes them sensitive to vibrations.
Low temperature drift
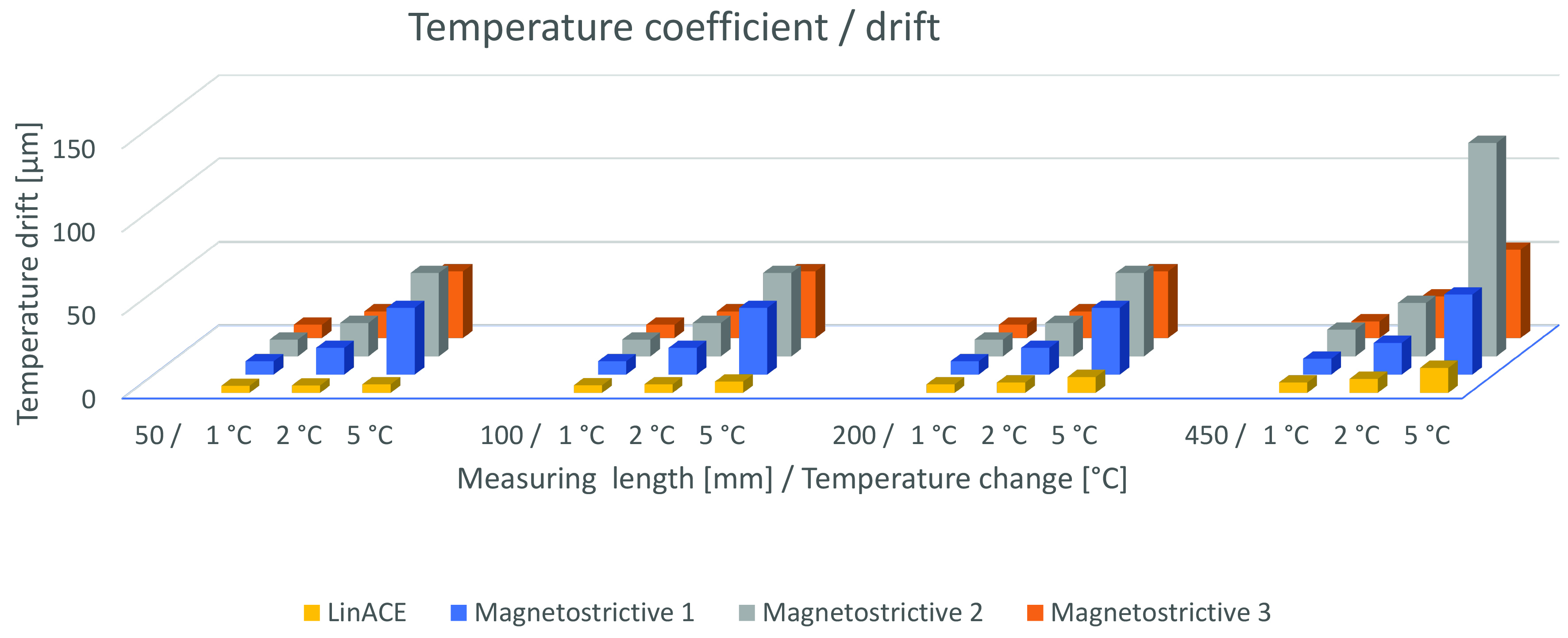
With temperature fluctuations we can expect some positional drift. Magnetostrictive transducers typically give a temperature drift of about 10μm/K for smaller measurement ranges and 15 ppm/K to 35 ppm/K for longer measurement lengths.
The LinACE position measurement changes with temperature only due to the thermal expansion of the encoded carbon steel shaft and the aluminium housing of the readhead. This is normally within the range of the thermal expansion of the device frame.
Temperature coefficient / drift
Other advantages of LinACE
a) Wider temperature range
The temperature range of LinACE extends from -30°C to +105°C, whereas most magnetostrictive sensors stop at 85°C. This makes LinACE suitable for a wide range of applications.
b) Low hysteresis
LinACE has a hysteresis of less than one resolution unit, while the typical hysteresis for magnetostrictive sensors is about 10 μm.
c) Lower power consumption
Both LinACE and the magnetostrictive sensors have a current consumption of about 100 mA. However, LinACE has a supply voltage of 5 V, while the magnetostrictive sensors require 24 V. This results in about 4-5 times lower power consumption of the LinACE compared to magnetostrictive sensors.
Specifications comparison
| LinACE | Magnetostrictive | |
| Measuring length | From 20 mm to 450 mm | From 50 mm to >4,000 mm |
| Encoder length | Measuring length + 29 mm to 40 mm | Measuring length + 150 mm to 200 mm |
| Resolution | To 0.5 μm (>15 bit on 20 mm range) | To 0.5 μm |
| Accuracy | To ±5 μm | ±50 μm |
| Hysteresis | Less than a unit of resolution | <10 μm |
| Sampling frequency | 4 kHz | 1 kHz |
| Output | Asynchronous serial, PWM, SSI, BiSS | Analogue, SSI, ProfiNet, CANopen |
| Supply voltage | 5 V | 24 V |
| Power consumption | Typ. 0.5 W* Max. 0.6 W* | 2.1 W to 3.6 W |
| IP protection | IP40 | IP68 |
| Temperature | From –30 °C to +105 °C | From –40 °C to +85 °C |
| Resistance to vibration | 40 g (resistance to shock 100 g) | 10 g to 20 g |
Configure LinACE™ Download whitepaper