
LinACE™ vs. magnetostrictive encoders with SSI output
LinACE™ 和磁致伸縮感測器可用於類似應用。不過,兩者之間有重大差異。
磁致伸縮感測器使用磁致伸縮原理來判斷位置。這些感測器由鐵磁波導管、定位磁鐵、阻尼區和應變脈衝轉換器以及量測電子裝置組成。電流脈衝會作用於波導管,產生徑向磁場,並與移動的定位磁鐵所產生的磁場互動。
該互動會造成扭轉應變脈衝,雙向沿著波導管傳播。在導管的一端,脈衝會減弱,另一端則會被應變脈衝轉換器轉換成電氣訊號。
根據觸發電流脈衝和接收電氣訊號之間經過的時間,可以計算出移動定位磁鐵的位置。
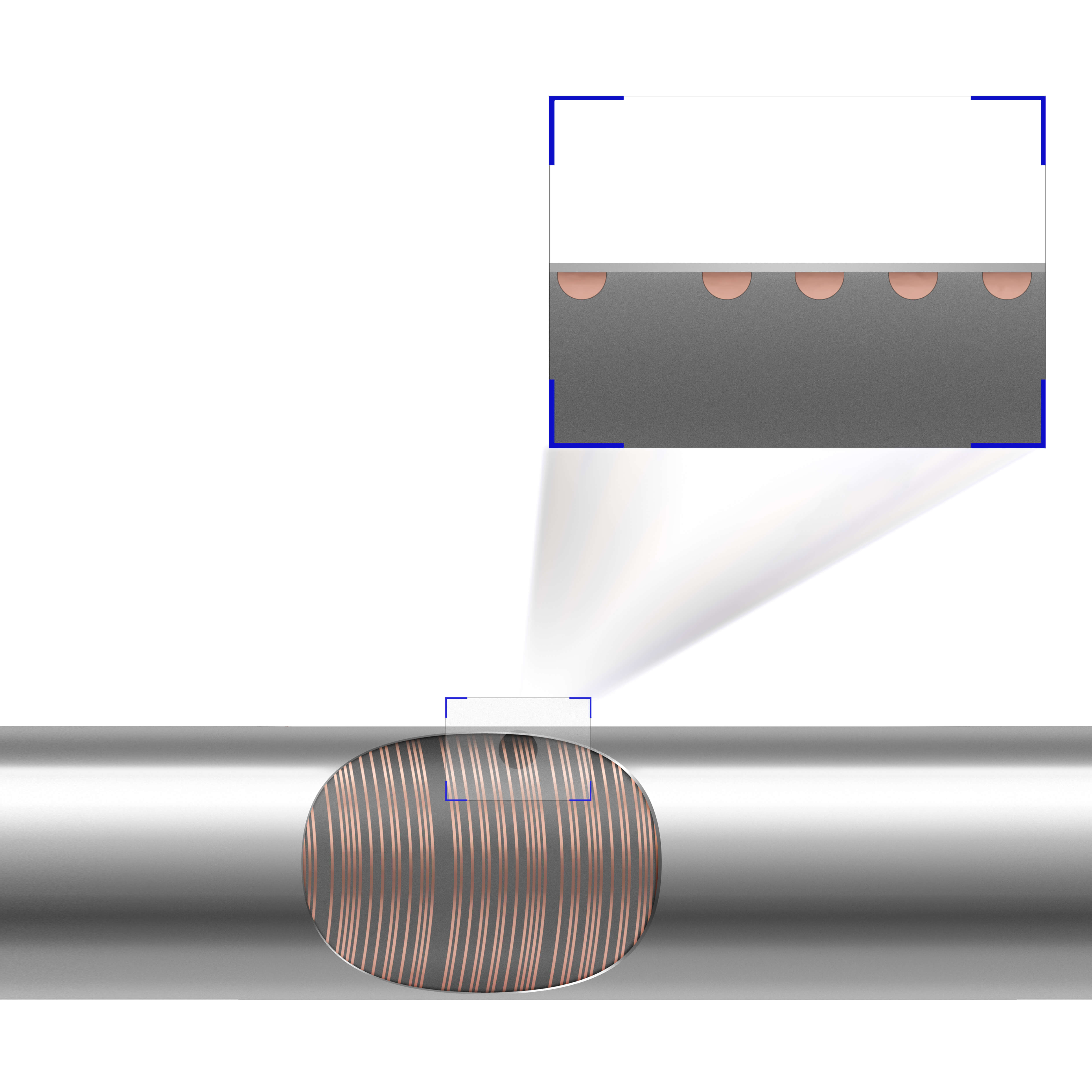
LinACE 感測器是與編碼承載系統或編碼位置的磁性尺所搭配的編碼器或讀頭。編碼軸的作用是做為磁性尺使用。
LinACE 讀頭會讀取編碼軸,並將編碼位置轉換成數位訊號。這是真正絕對式編碼器。提供非同步序列、PWM、SSI 和 BiSS 輸出版本,並提供多種可選擇的解析度,範圍為 10 µm 至 0.5 µm,速度最高 5 m/s。
為何選擇 LinACE 編碼器而非磁致伸縮感測器?
有關 LinACE 的更多資訊,請造訪 LinACE 網站。
高精度
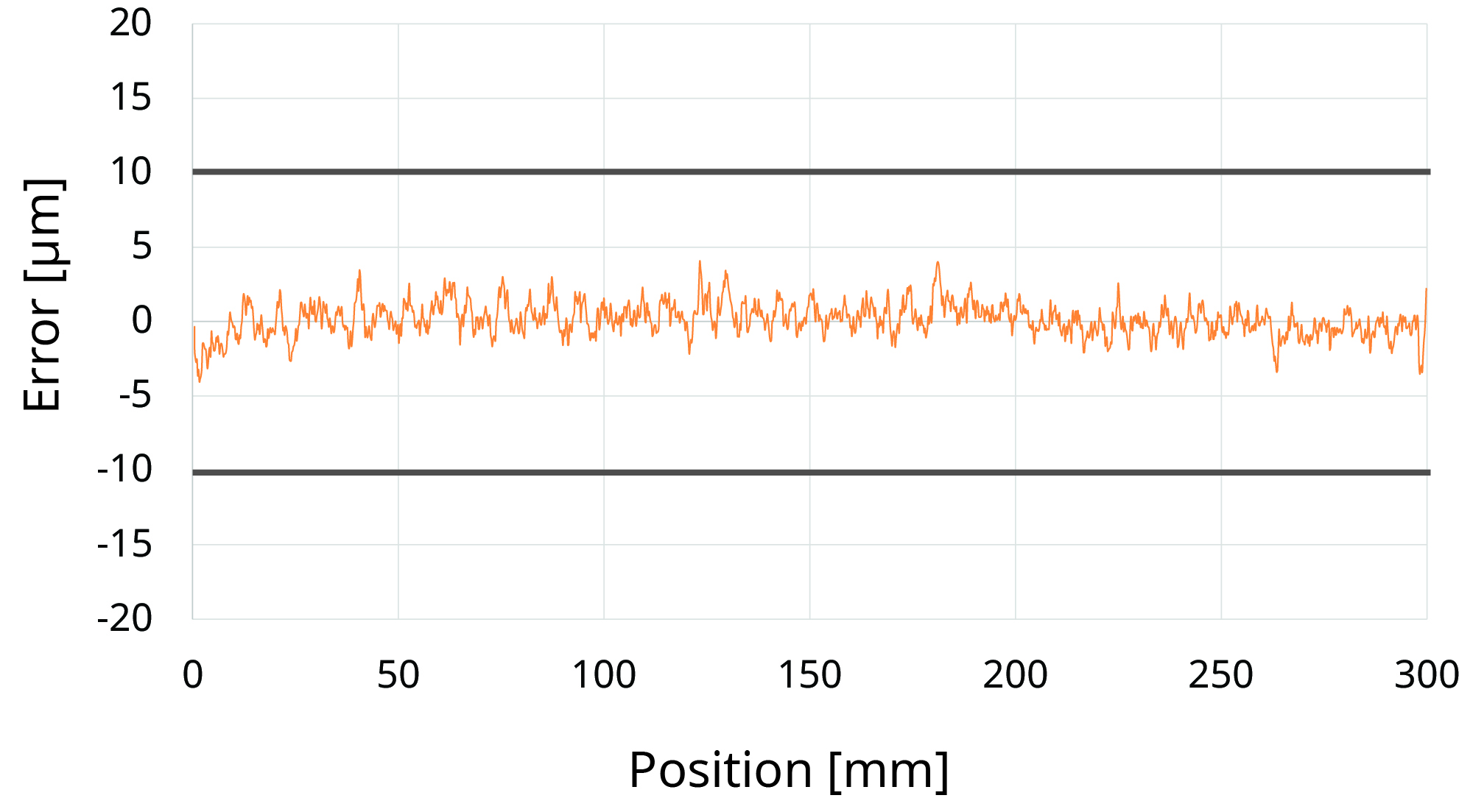
LinACE 編碼器具有 10 µm 至 0.5 µm 的解析度以及 ±100 µm 至 ±5 µm 的精度。±5 µm 的精度適用於最多 100 mm 的量測長度。±10 µm 的精度則適用於最多 450 mm 的量測長度。
下表會顯示量測長度 100 mm 時的標準精度以及 ±5 µm 精度。
LinACE 精度圖
不過,因為編碼軸與鋁合金外殼會熱膨脹,我們也必須考慮溫度漂移。
磁致伸縮編碼器也可提供 0.5 µm 的解析度。不過,磁致伸縮編碼器會指定線性度而非精度。在長度最多 500 mm 的情況下,標準線性度為 ±40 µm 或 ±50 µm。
請注意,磁致伸縮感測器的溫度漂移也會高於 LinACE,如以下章節所述。
小巧的設計
LinACE 的讀頭長度介於 29 mm 至 40 mm 之間,直徑最大 35 mm。兩端沒有阻尼區。編碼實心鋼軸的整個長度可用於量測位置。
磁致伸縮轉換器具備約 80 mm 的標準感測器測頭長度,感測器測器測頭到歸零位置為 25 至 50 mm,桿末端的阻尼區為 60 mm。因此轉換器總長度為量測長度 + 150 至 200 mm。感測器測頭的截面可為將近 50 mm。
比較 LinACE 編碼器與磁致伸縮轉換器的設計
![]()
抗振性
LinACE 編碼器具備抗衝擊與振動的能力。即使軸在向前和向後移動時旋轉,編碼器位置也維持不變。
磁致伸縮編碼器的運作是利用扭轉應變脈衝沿著波導管移動來運作。因此很容易受動振動影響。
低溫度漂移
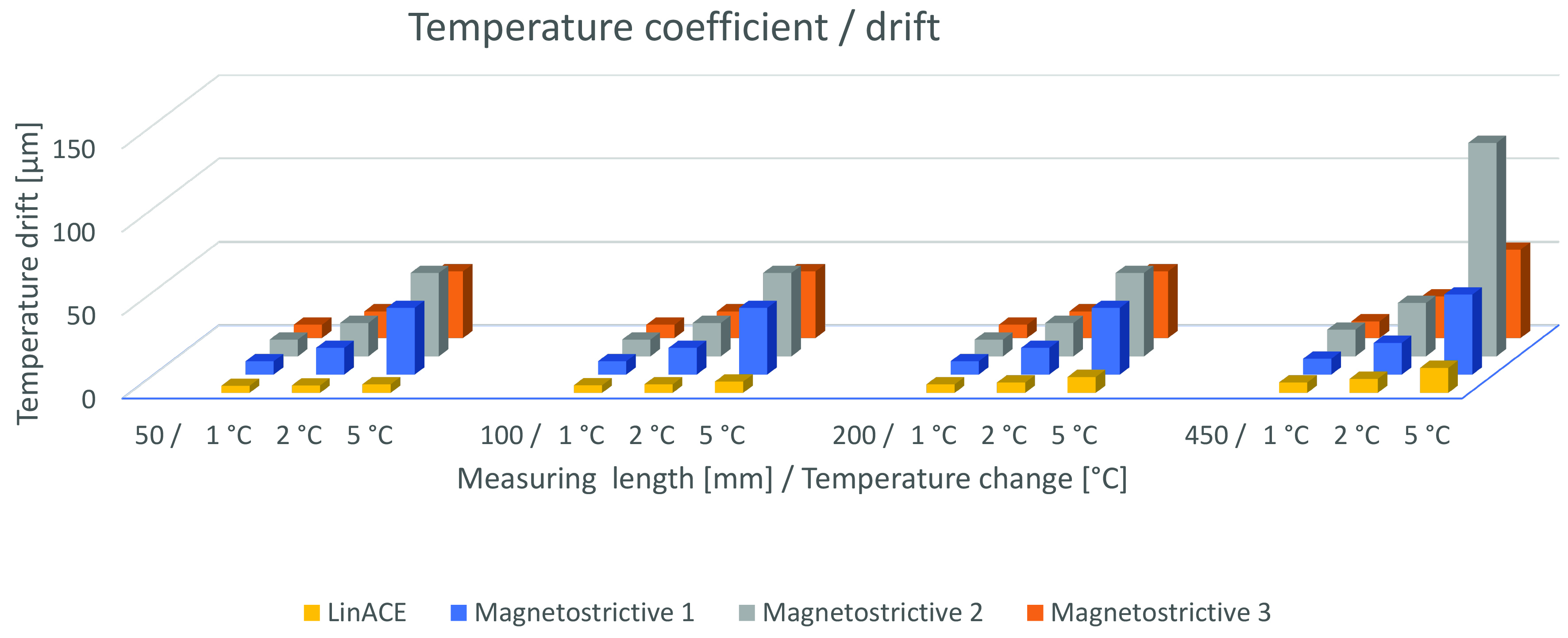
發生溫度波動時,我們可以預期導致位置產生漂移。磁致伸縮轉換器通常在較小量測範圍的溫度漂移為約 10 µm/K,較長量測長度時則為 15 ppm/K 至 35 ppm/K。
LinACE 位置量測只會因為編碼碳鋼軸和讀頭的鋁合金外殼發生熱膨脹,而隨著溫度漂移。其變化通常在裝置外框的熱膨脹範圍內。
溫度係數/漂移
LinACE 的其他優勢
a) 更寬鬆的溫度範圍
LinACE 的溫度範圍為從 -30°C 至 +105°C,大部分的磁致伸縮感測器的溫度上限則為 85°C。這讓 LinACE 適合更廣泛的應用。
b) 低遲滯
LinACE 的遲滯少於一個解析度單位,磁致伸縮感測器的標準遲滯則為約 10 µm。
c) 耗電量低
LinACE 和磁致伸縮感測器的耗電量約為 100 mA。不過,LinACE 的電源供應電壓為 5 V,磁致伸縮感測器則需要 24 V。這導致 LinACE 的電力消耗比磁致伸縮感測器低 4-5 倍。
規格比較
| LinACE | 磁致伸縮 | |
| 量測長度 | 從 20 mm 至 450 mm | 從 50 mm 至 >4,000 mm |
| 編碼器長度 | 測量長度 + 29 mm 至 40 mm | 測量長度 + 150 mm 至 200 mm |
| 解析度 | 至 0.5 µm(20 mm 範圍時 >15 位元) | 至 0.5 µm< |
| 準確度 | 至 ±5 µm | ±50 µm |
| 滯後 | 低於一個解析度單位 | <10 µm |
| 取樣頻率 | 4 kHz | 1 kHz |
| 輸出 | 異步化序列、PWM、SSI、BiSS | 類比,SSI,ProfiNet,CANopen |
| 供應電壓 | 5 V | 24 V |
| 耗電量 | 標準 0.5 W* 最大 0.6 W* | 2.1 W 至 3.6 W |
| IP 防護等級 | IP40 | IP68 |
| 溫度 | -30°C 至 +105°C | -40°C 至 +85°C |
| 抗振性 | 40 g(抗衝擊性 100 g) | 10 g 至 20 g |